
ElectroGlide was awarded in the iF Design Student Award 2025, selected as one of the top 70 winners from over 7,000 global entries, making it one of the most competitive and prestigious student design recognitions in the world.
Please Watch: How Users Shaped This Design
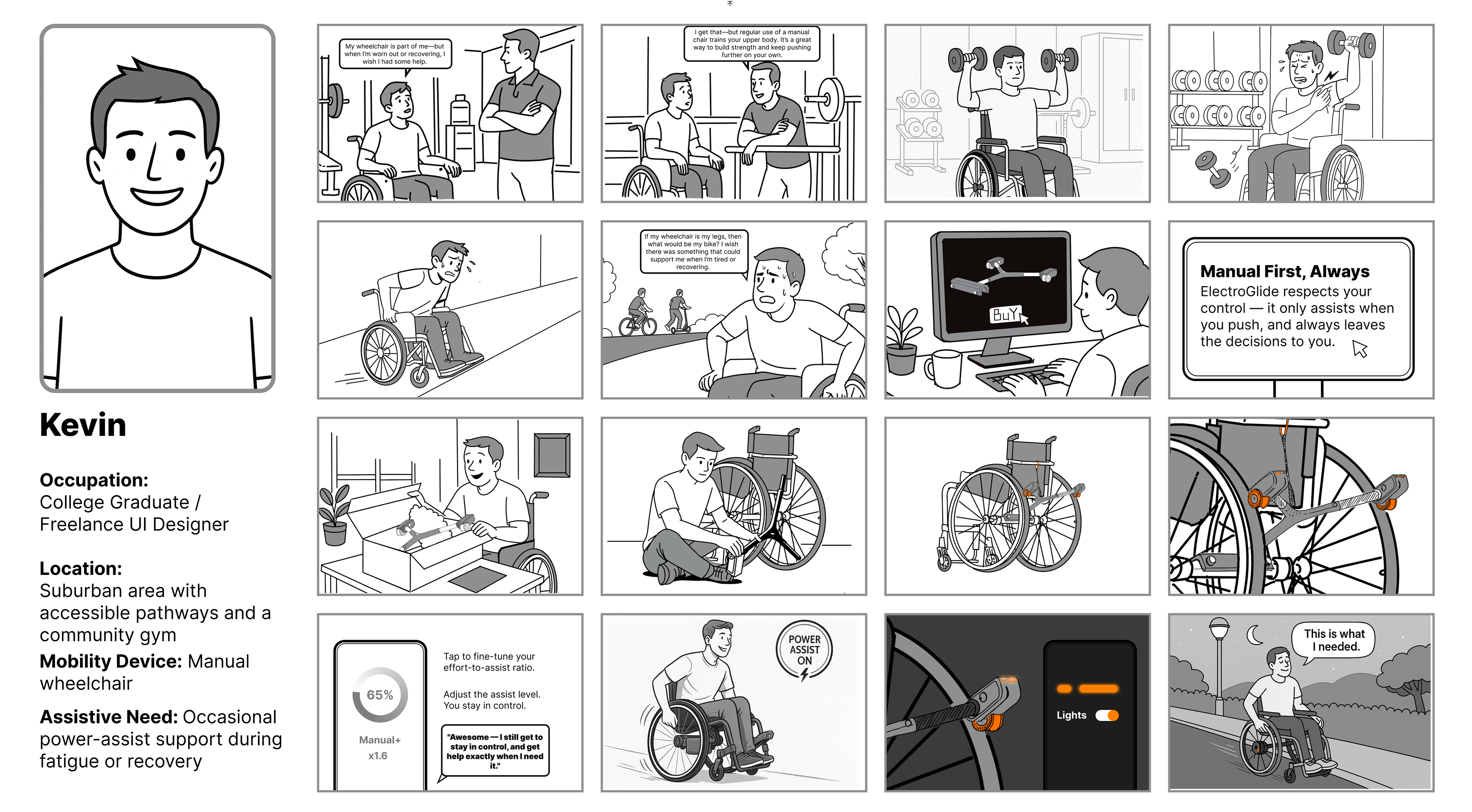
Designing with, not for: Co-Creating with Wheelchair Users

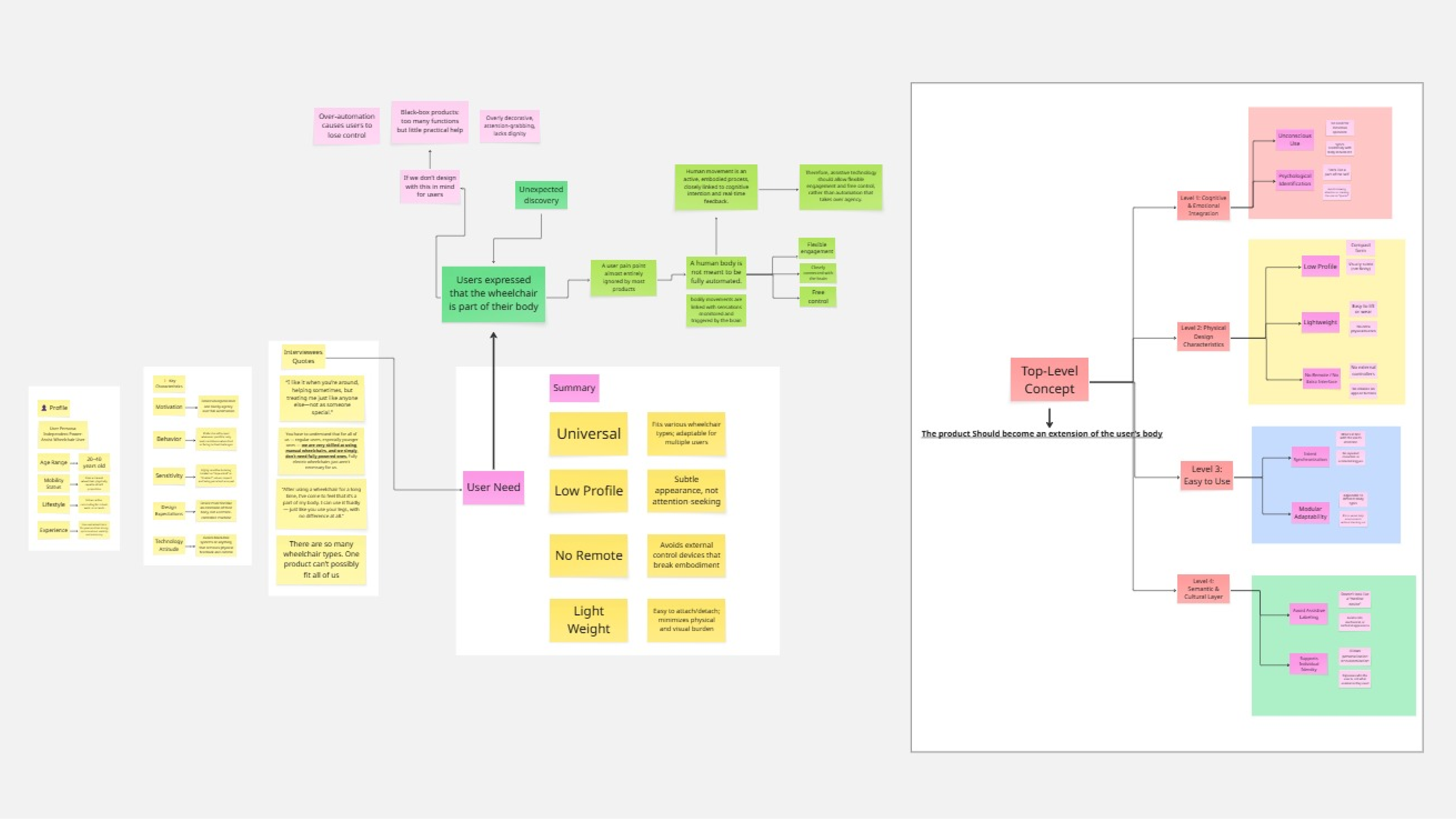
Design Logic Map: Translating Research into a Multi-Level Product Strategy
This multi-layer logic map visualizes how insights from user interviews were translated into four key design layers—from emotional needs to cultural embodiment. Click Here


Animation








